The dataset associated with Robotics Transformer (RT-1) is a large dataset of demonstrations containing over 130k episodes collected over the course of 17 months with 13 robots.
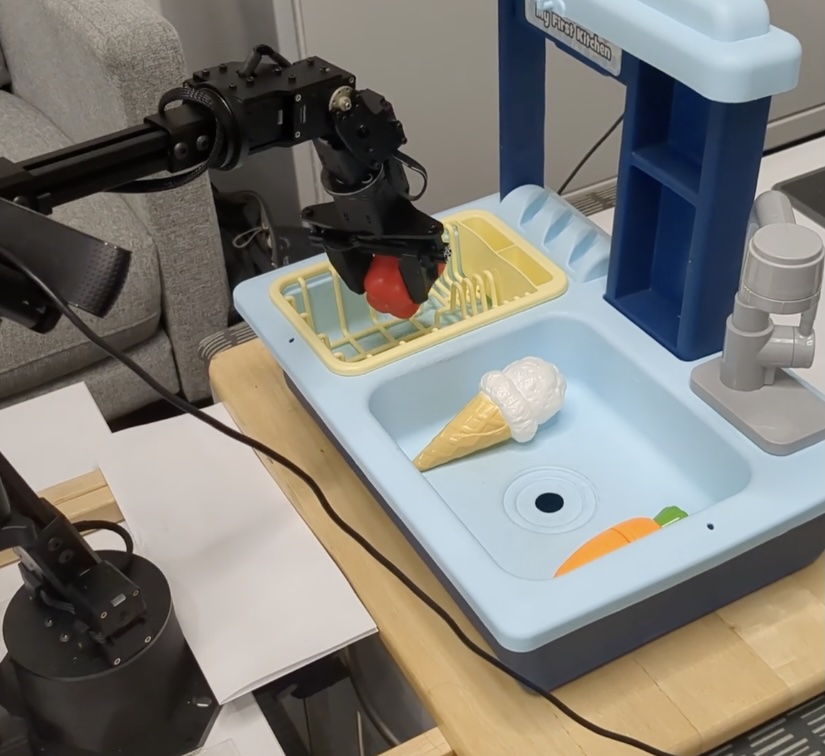
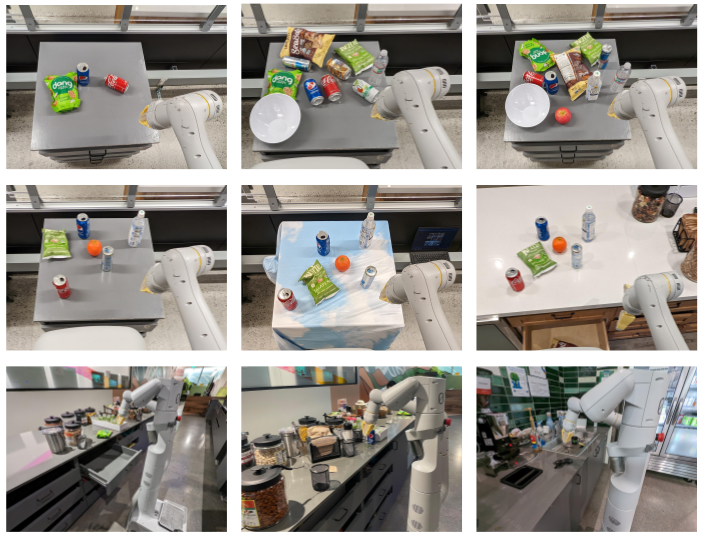
Each of the robots autonomously approaches its station at the beginning of the episode and communicates to the operator the instruction that they should demonstrate to the robot. To ensure a balanced dataset as well as randomization of the scene, the authors created a software module responsible for sampling the instructions to be demonstrated as well as the randomization of the background configuration. Each of the robots tells the demonstrator how to randomize the scene and which instruction to demonstrate.
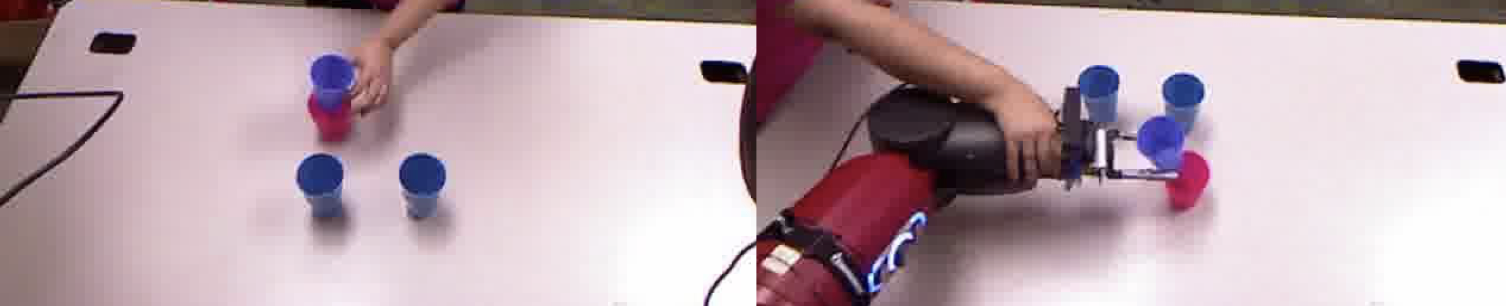
Demonstrations are collected with direct line-of-sight between operator and robot using 2 virtual reality remotes. They map remote controls onto our policy action space to preserve consistency of the transition-dynamics. 3D position and rotational displacements of the remote are mapped to 6d displacements of the robot tool. The x, y position of the joystick is mapped to a turning angle and driving distance of the mobile base. They compute and track trajectories to the target poses that we obtain from the joystick commands.
@inproceedings{rt12022arxiv,
title = {RT-1: Robotics Transformer for Real-World Control at Scale},
author = {Anthony Brohan and Noah Brown and Justice Carbajal and Yevgen Chebotar and Joseph Dabis and Chelsea Finn and Keerthana Gopalakrishnan and Karol Hausman and Alex Herzog and Jasmine Hsu and Julian Ibarz and Brian Ichter and Alex Irpan and Tomas Jackson and Sally Jesmonth and Nikhil Joshi and Ryan Julian and Dmitry Kalashnikov and Yuheng Kuang and Isabel Leal and Kuang-Huei Lee and Sergey Levine and Yao Lu and Utsav Malla and Deeksha Manjunath and Igor Mordatch and Ofir Nachum and Carolina Parada and Jodilyn Peralta and Emily Perez and Karl Pertsch and Jornell Quiambao and Kanishka Rao and Michael Ryoo and Grecia Salazar and Pannag Sanketi and Kevin Sayed and Jaspiar Singh and Sumedh Sontakke and Austin Stone and Clayton Tan and Huong Tran and Vincent Vanhoucke and Steve Vega and Quan Vuong and Fei Xia and Ted Xiao and Peng Xu and Sichun Xu and Tianhe Yu and Brianna Zitkovich},
booktitle = {arXiv preprint arXiv:2212.06817},
year = {2022}
}