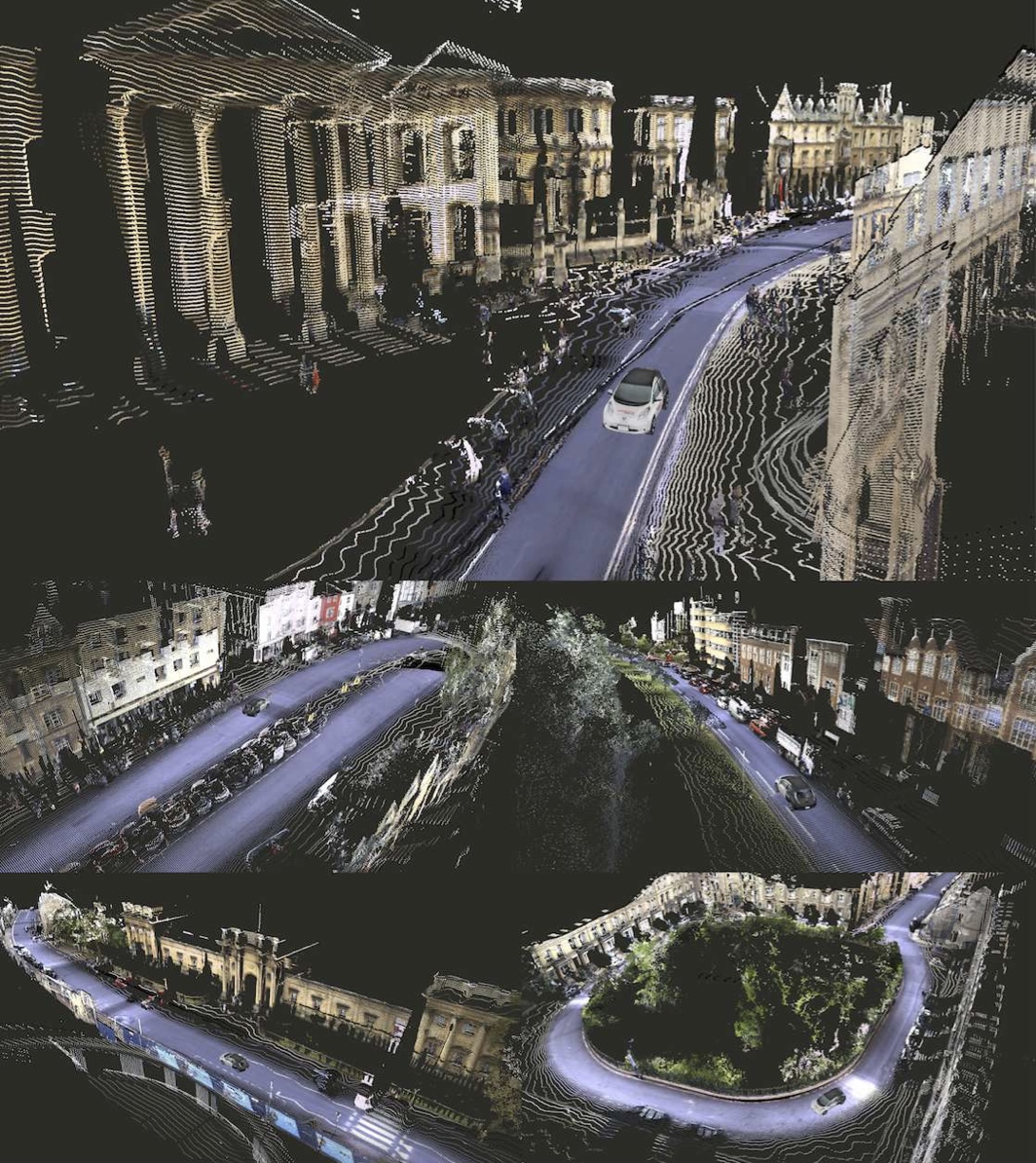
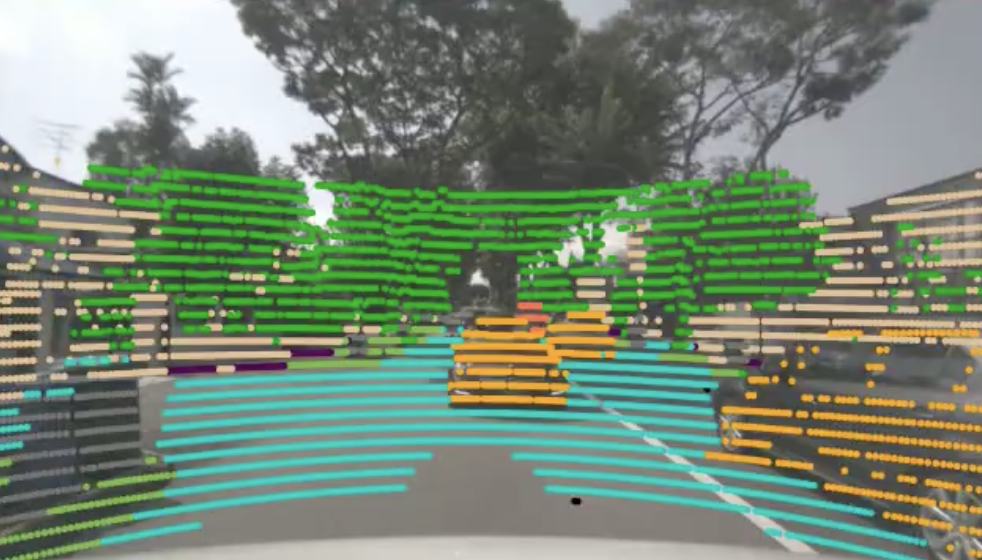
The Waymo Open Dataset (WOD), sometimes referred to as the Perception Dataset, is a large-scale, diverse, multimodal dataset of 2,030 driving scenes (or segments), each spanning 20 seconds. Each scene contains synchronized and calibrated LiDAR and camera data across a range of urban and suburban environments.
The Waymo Open Dataset is intended for research in autonomous driving technologies, and contains data that can be used to research machine perception and sensor fusion.
@article{DBLP:journals/corr/abs-1912-04838,
author = {Pei Sun and
Henrik Kretzschmar and
Xerxes Dotiwalla and
Aurelien Chouard and
Vijaysai Patnaik and
Paul Tsui and
James Guo and
Yin Zhou and
Yuning Chai and
Benjamin Caine and
Vijay Vasudevan and
Wei Han and
Jiquan Ngiam and
Hang Zhao and
Aleksei Timofeev and
Scott Ettinger and
Maxim Krivokon and
Amy Gao and
Aditya Joshi and
Yu Zhang and
Jonathon Shlens and
Zhifeng Chen and
Dragomir Anguelov},
title = {Scalability in Perception for Autonomous Driving: Waymo Open Dataset},
journal = {CoRR},
year = {2019},
url = {http://arxiv.org/abs/1912.04838}
}