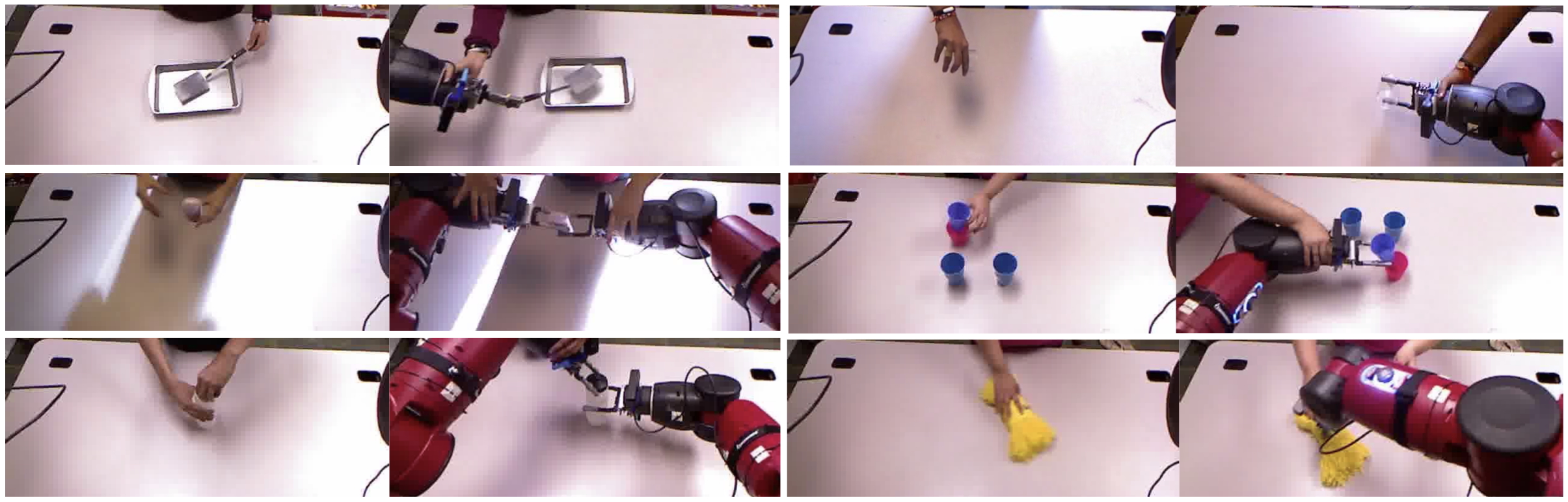
The RoboTurk dataset contains 2,144 demonstrations of real world, teleoperated robot manipulation sequences on three manipulation tasks. There are over 111 hours of RGB and depth video recordings, along with corresponding timestamped joint data and control data from the user. Data was collected from 54 unique users over the course of 1 week.
The RoboTurk dataset is intended to provide demonstrations of long-horizon, complex 3D manipulation tasks. It may be useful in applications like multimodal density estimation, video prediction, reward function learning, policy learning and hierarchical task planning.
@inproceedings{mandlekar2019scaling,
title={Scaling robot supervision to hundreds of hours with roboturk: Robotic manipulation dataset through human reasoning and dexterity},
author={Mandlekar, Ajay and Booher, Jonathan and Spero, Max and Tung, Albert and Gupta, Anchit and Zhu, Yuke and Garg, Animesh and Savarese, Silvio and Fei-Fei, Li},
booktitle={2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={1048--1055},
year={2019},
organization={IEEE}
}