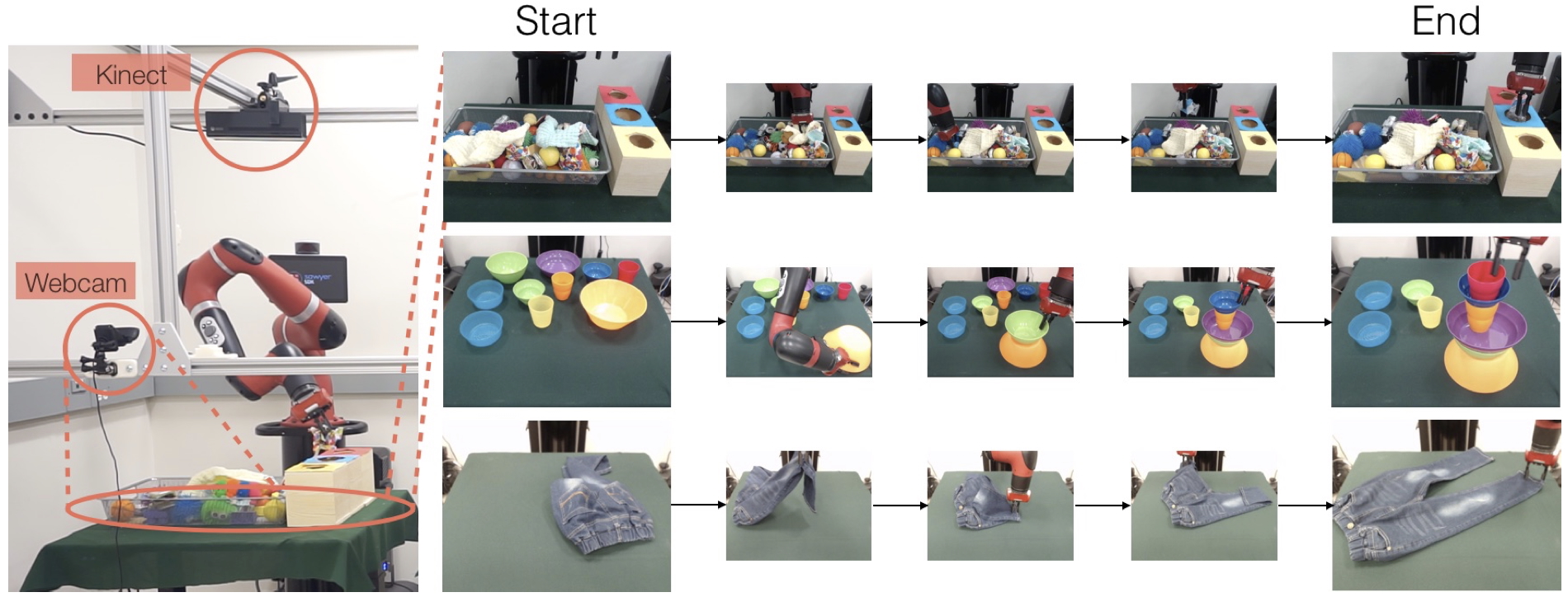
RoboNet is an open database for sharing robotic experience, which provides an initial pool of 15 million video frames, from 7 different robot platforms. The dataset is collected autonomously with minimal human intervention, in a self-supervised manner, and is designed to be easily extensible to new robotic hardware, various sensors, and different collection policies.
All trajectories in RoboNet share a similar action space, which consists of deltas in position and rotation to the robot end-effector, with one additional dimension of the action vector reserved for the gripper joint. The frame of reference is the root link of the robot, which need not coincide with the camera pose. This avoids the need to calibrate the camera, but requires any model to infer the relative positioning between the camera and the robots’ reference frames from a history of context frames.
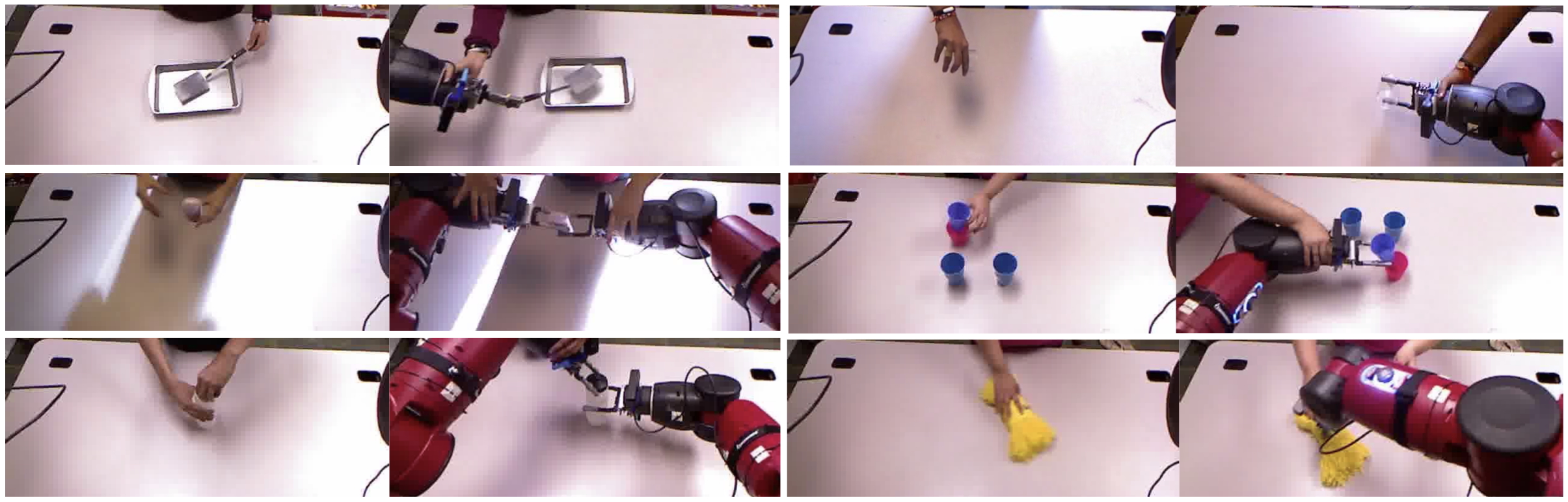
The environments in the RoboNet dataset vary both in robot hardware, i.e. robot arms and grippers, as well as environment, i.e arena, camera-configuration and lab setting, which manifests as different backgrounds and lighting conditions.
null