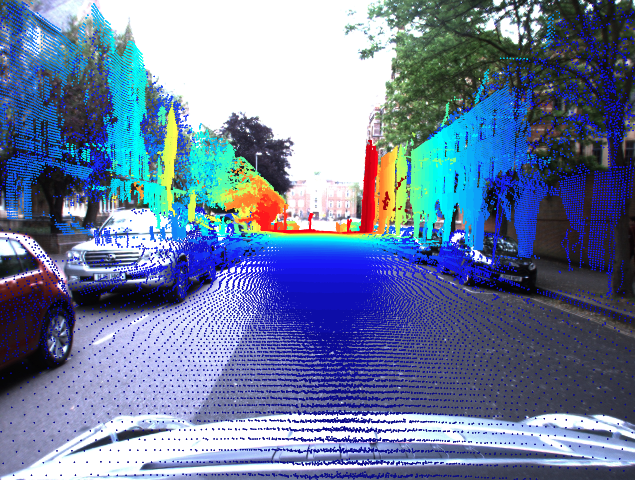
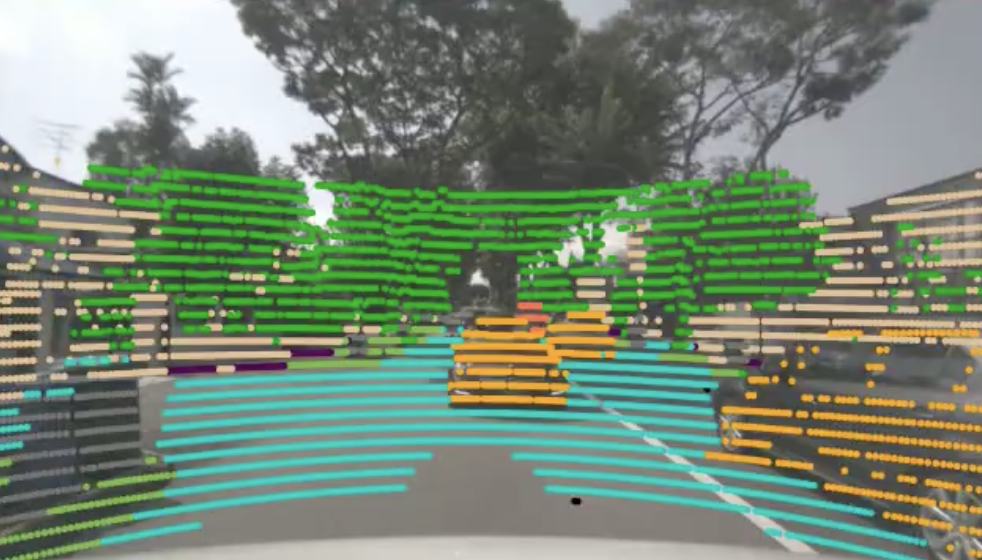
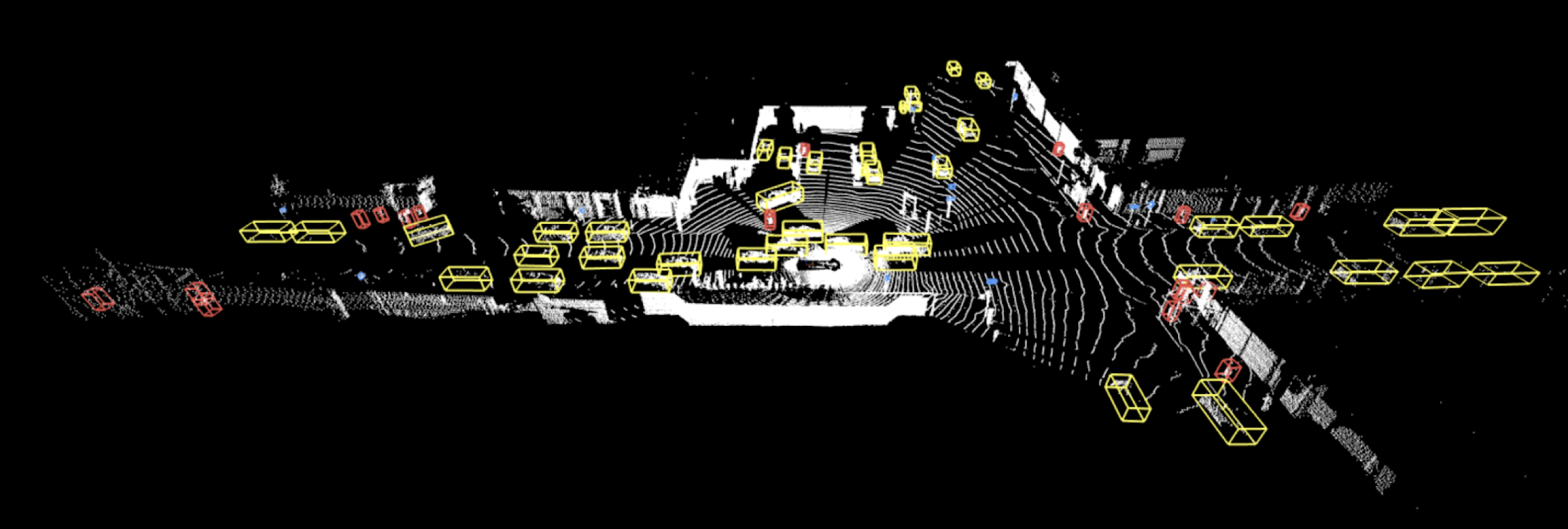
In an effort to help align the research community’s contributions with real-world self-driving problems, we introduce a new large-scale, high quality, diverse dataset. Our new dataset consists of 1150 scenes that each span 20 seconds, consisting of well synchronized and calibrated high quality LiDAR and camera data captured across a range of urban and suburban geographies. It is 15x more diverse than the largest camera+LiDAR dataset available based on our proposed geographical coverage metric. The authors exhaustively annotated this data with 2D (camera image) and 3D (LiDAR) bounding boxes, with consistent identifiers across frames.
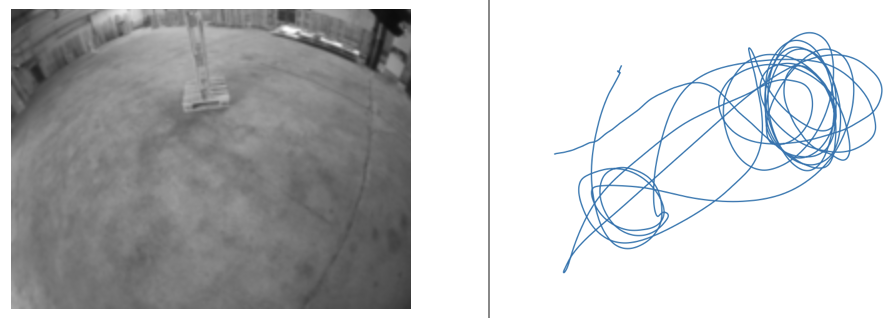
The Waymo Open Dataset is composed of three datasets - the Perception Dataset with high resolution sensor data and labels for 2,030 segments, the Motion Dataset with object trajectories and corresponding 3D maps for 103,354 segments, and the End-to-End Driving Dataset with camera images providing 360-degree coverage and routing instructions for 5,000 segments.
null