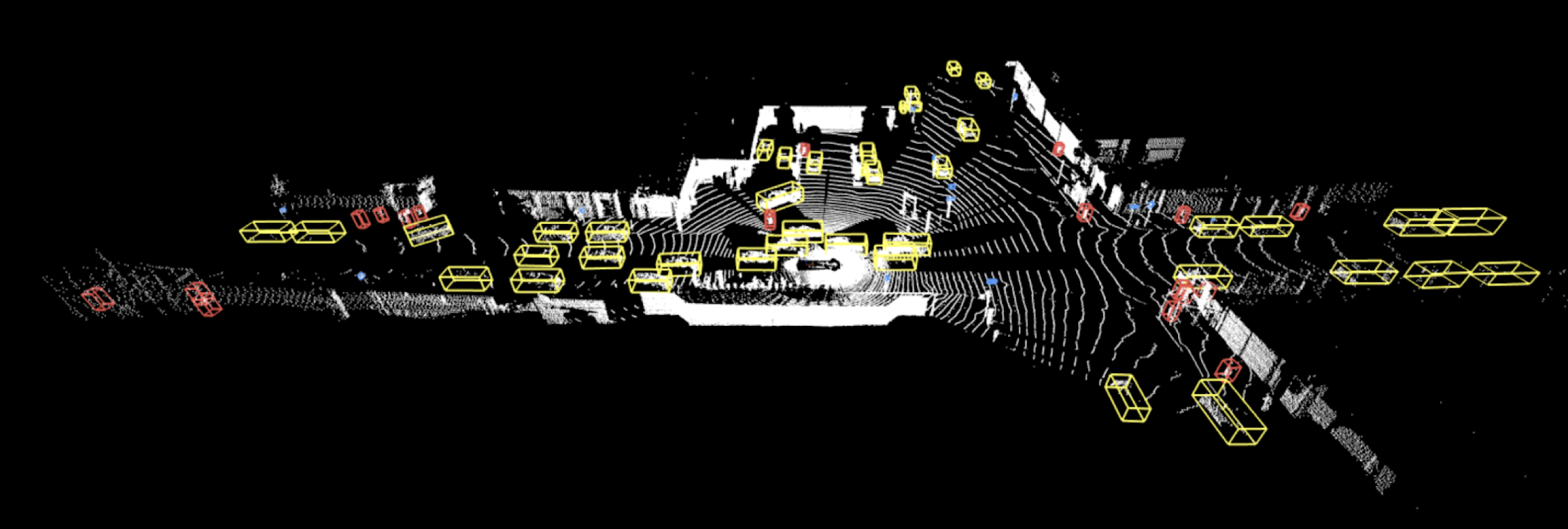
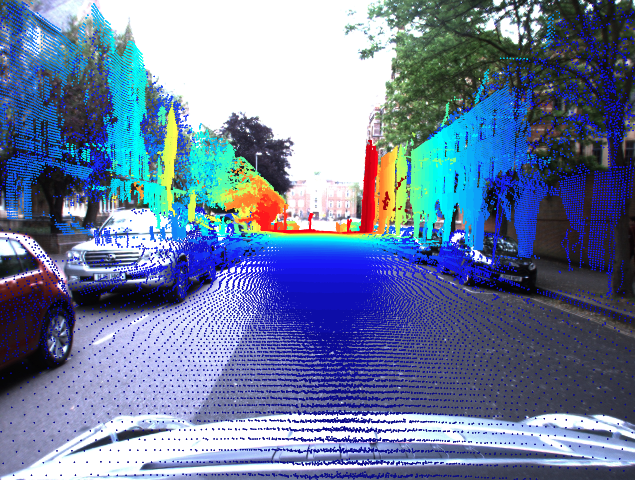
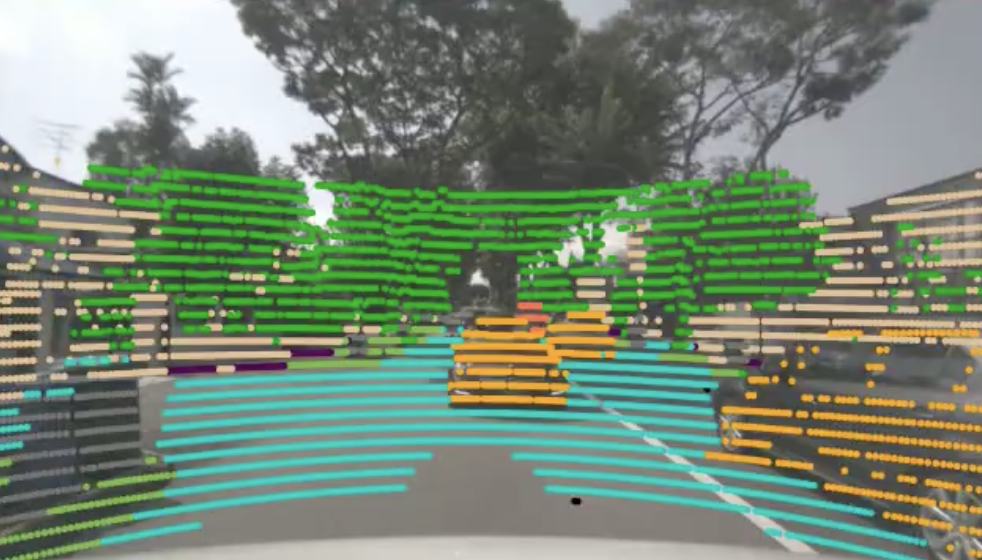
The nuScenes dataset (pronounced /nuːsiːnz/) is a public large-scale dataset for autonomous driving developed by the team at Motional (formerly nuTonomy). nuScenes is the first dataset to carry the full autonomous vehicle sensor suite: 6 cameras, 5 radars and 1 lidar, all with full 360 degree field of view. nuScenes comprises 1000 scenes, each 20s long and fully annotated with 3D bounding boxes for 23 classes and 8 attributes. It has 7x as many annotations and 100x as many images as the KITTI dataset.
For this purpose the authors collected 1000 driving scenes in Boston and Singapore, two cities that are known for their dense traffic and highly challenging driving situations. The scenes of 20 second length are manually selected to show a diverse and interesting set of driving maneuvers, traffic situations and unexpected behaviors. The rich complexity of nuScenes will encourage development of methods that enable safe driving in urban areas with dozens of objects per scene. Gathering data on different continents further allows us to study the generalization of computer vision algorithms across different locations, weather conditions, vehicle types, vegetation, road markings and left versus right hand traffic.
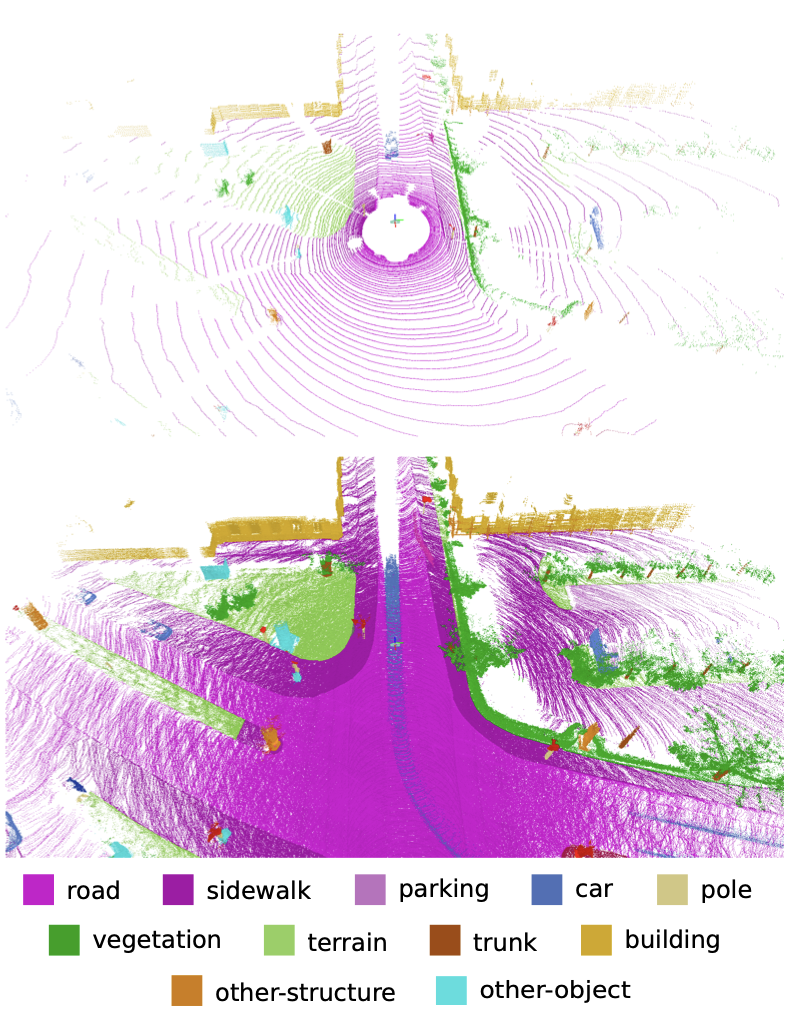
To facilitate common computer vision tasks, such as object detection and tracking, they annotate 23 object classes with accurate 3D bounding boxes at 2Hz over the entire dataset. Additionally they annotate object-level attributes such as visibility, activity and pose.
@article{nuscenes2019,
author = {Holger Caesar and Varun Bankiti and Alex H. Lang and Sourabh Vora and Venice Erin Liong and Qiang Xu and Anush Krishnan and Yu Pan and Giancarlo Baldan and Oscar Beijbom},
journal = {arXiv preprint arXiv:1903.11027},
title = {nuScenes: A multimodal dataset for autonomous driving},
year = {2019}
}