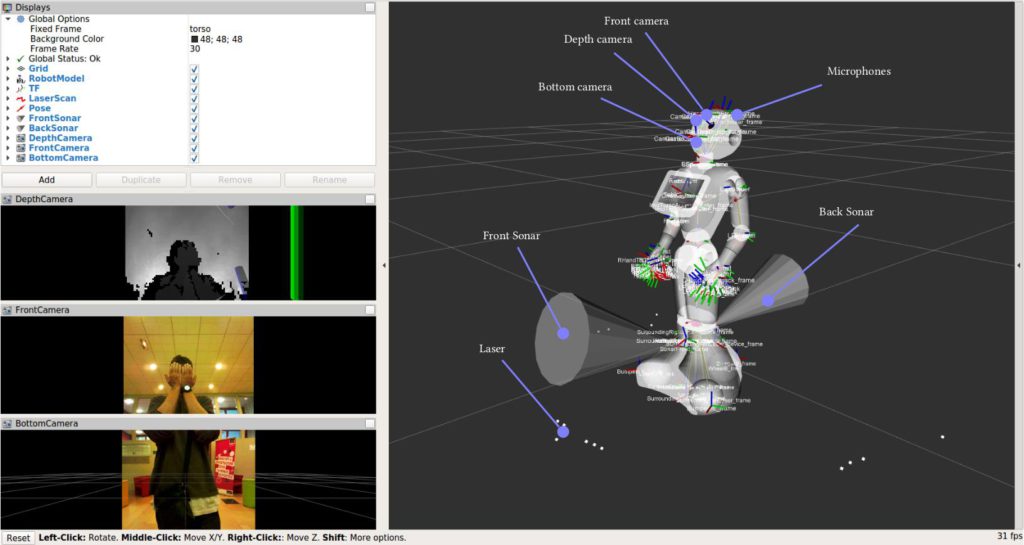
The UE-HRI dataset consists of recordings of humans interacting with social robot Pepper. It targets the diverse social signals that are involved in user engagement, considering a wide range of heterogeneous sensors: a microphone array, cameras, depth sensors, sonars, lasers, along with user feedback captured through Pepper’s touch screen.
All data streams available on Pepper are packaged in the open-source Robot Operating System (ROS) framework. Each stream is passed into a message (called ROS topic) and packaged together into a ROSbag file. All streams are indexed using the robot timestamps to avoid synchronisation issues.
@inproceedings{Ben-Youssef:2017:UE-HRI_Dataset,
author = {Ben-Youssef, Atef and Clavel, Chlo{'e} and Essid, Slim and Bilac, Miriam and Chamoux, Marine and Lim, Angelica},
title = {UE-HRI: A New Dataset for the Study of User Engagement in Spontaneous Human-robot Interactions},
booktitle = {Proceedings of the 19th ACM International Conference on Multimodal Interaction},
year = {2017},
doi = {10.1145/3136755.3136814}
}