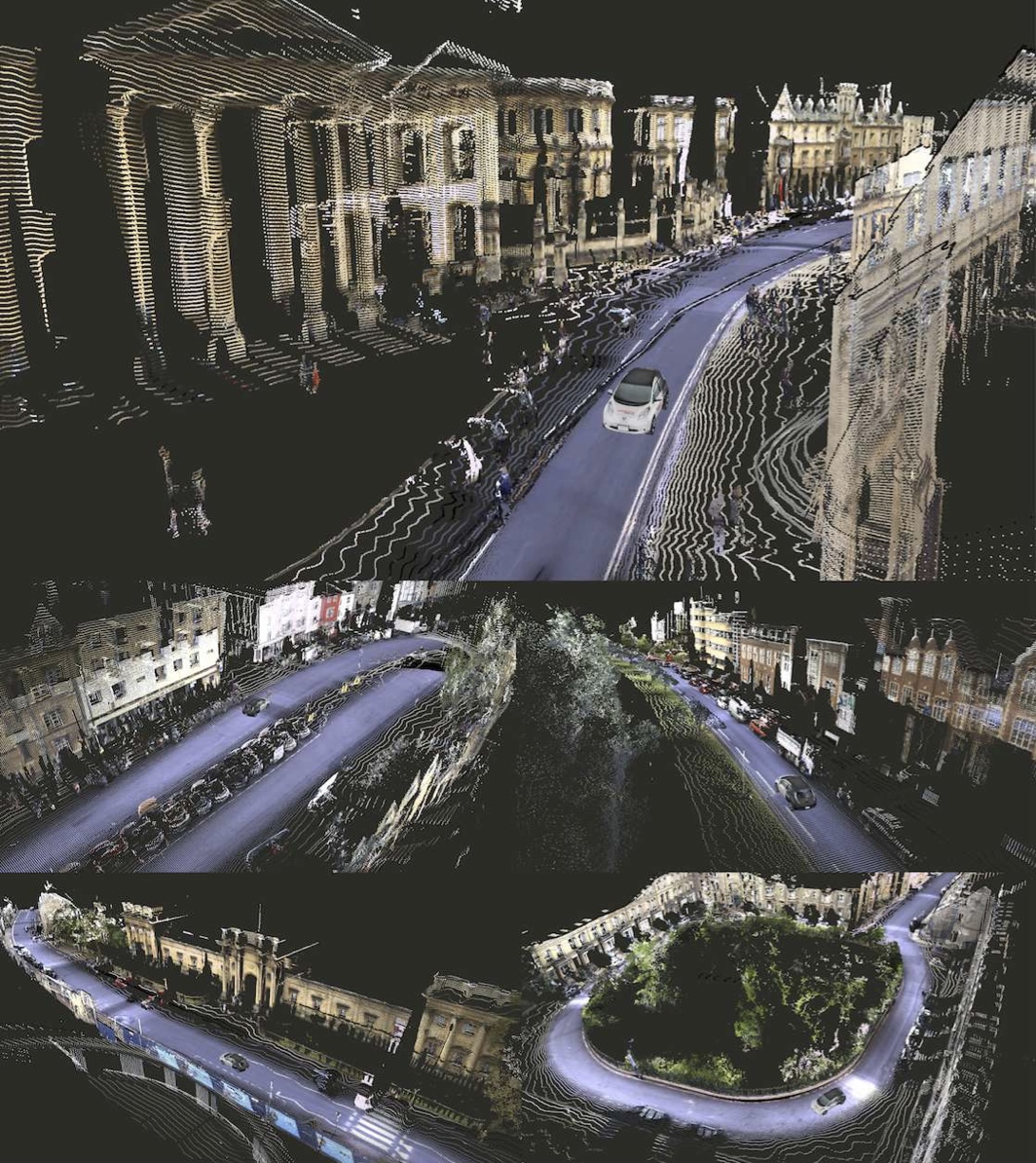
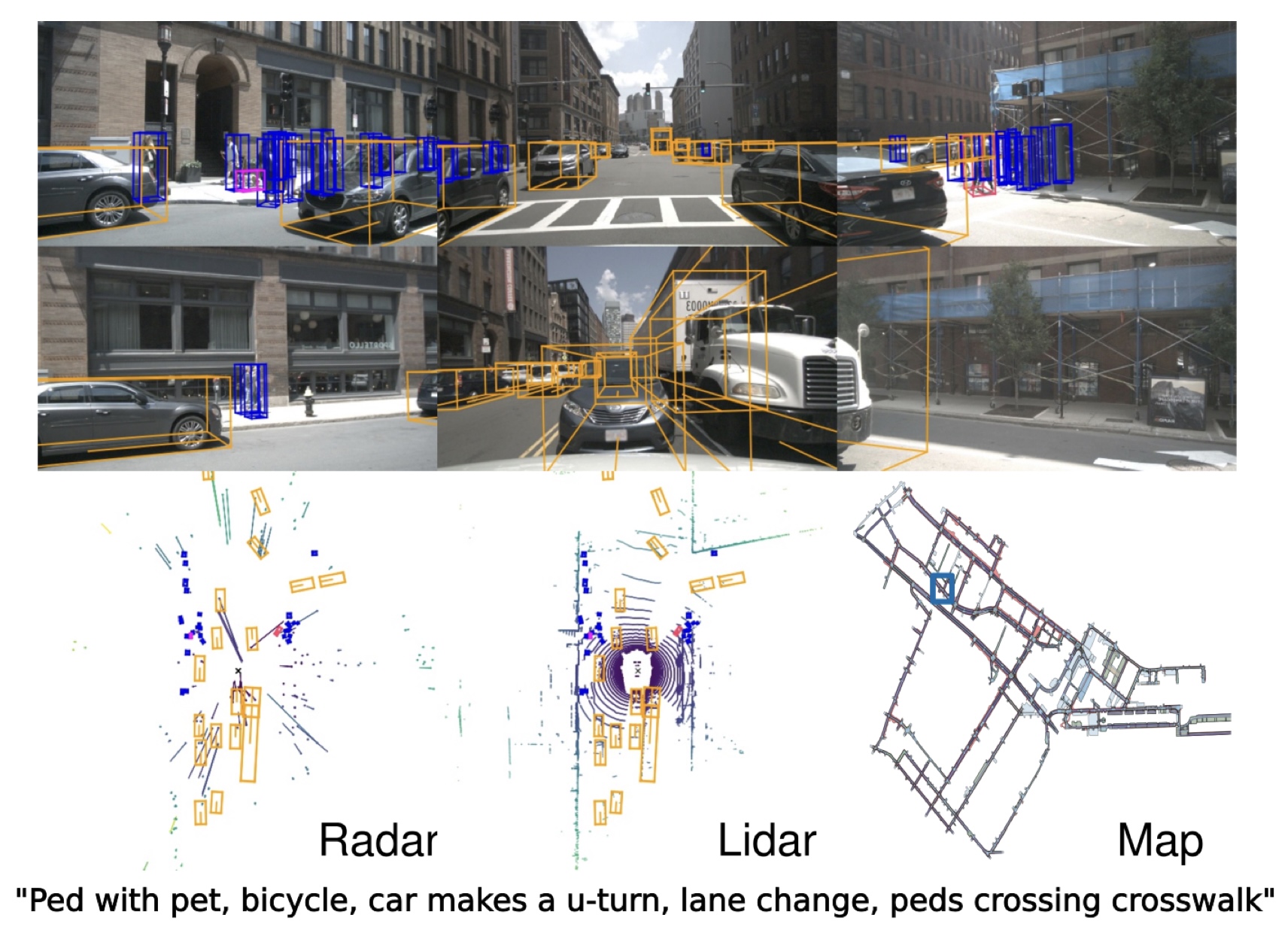
The nuScenes dataset is a large-scale autonomous driving dataset containing 1000 scenes, each 20s long and annotated with 3D bounding boxes for 23 classes and 8 attributes. Data was recorded from 6 cameras, 5 radars, and 1 LiDAR, all with full 360-degree field of view. The full dataset includes approximately 1.4M camera images, 390k LIDAR sweeps, 1.4M RADAR sweeps, and 1.4M object bounding boxes in 40k keyframes.
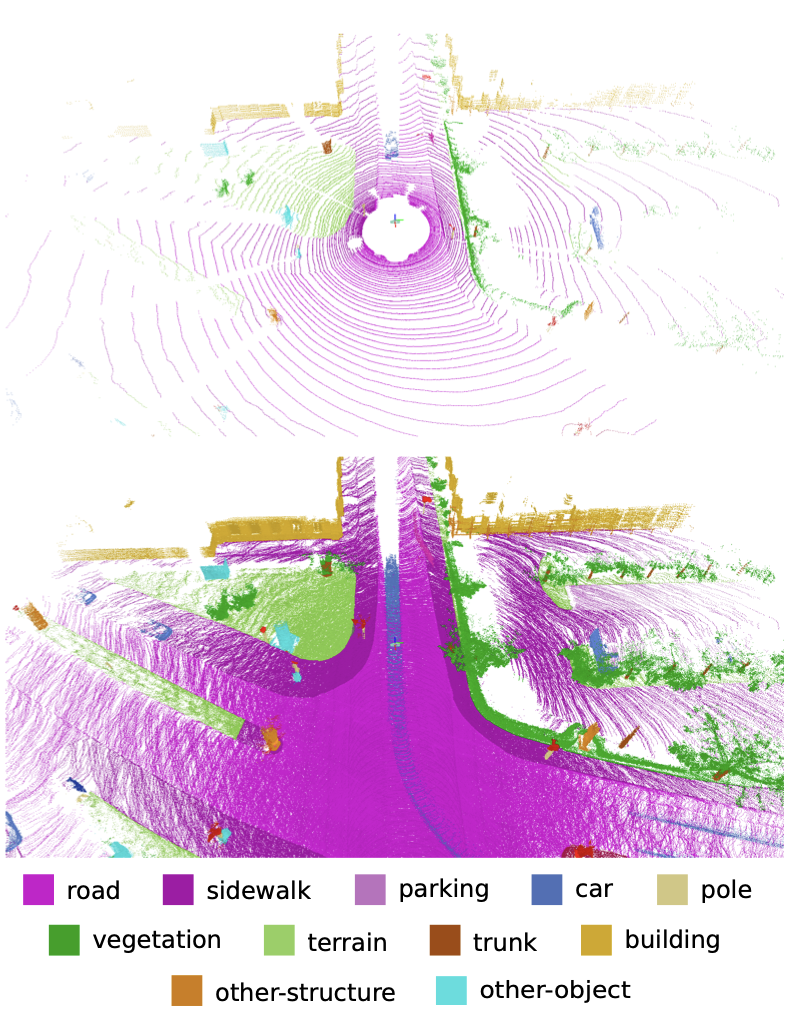
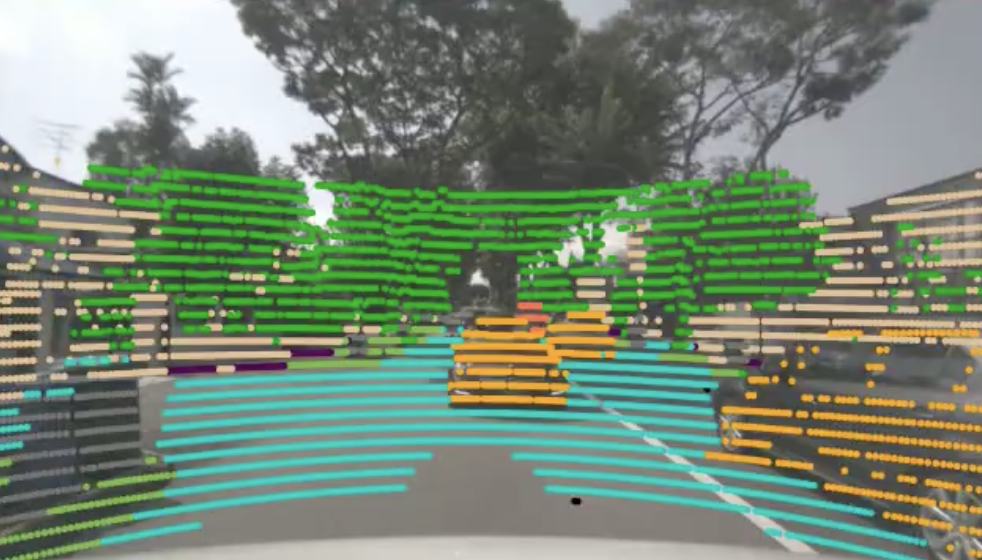
In an extension of the dataset, nuScenes-lidarseg, the authors also annotate each LiDAR point from a keyframe in nuScenes with one of 32 possible semantic labels, yielding 1.1B annotated points across 40k pointclouds and 1000 scenes.
This dataset is intended to support research in computer vision and autonomous driving technologies in challenging urban driving situations.
@article{nuscenes2019,
author = {Holger Caesar and Varun Bankiti and Alex H. Lang and Sourabh Vora and Venice Erin Liong and Qiang Xu and Anush Krishnan and Yu Pan and Giancarlo Baldan and Oscar Beijbom},
journal = {arXiv preprint arXiv:1903.11027},
title = {nuScenes: A multimodal dataset for autonomous driving},
year = {2019}
}