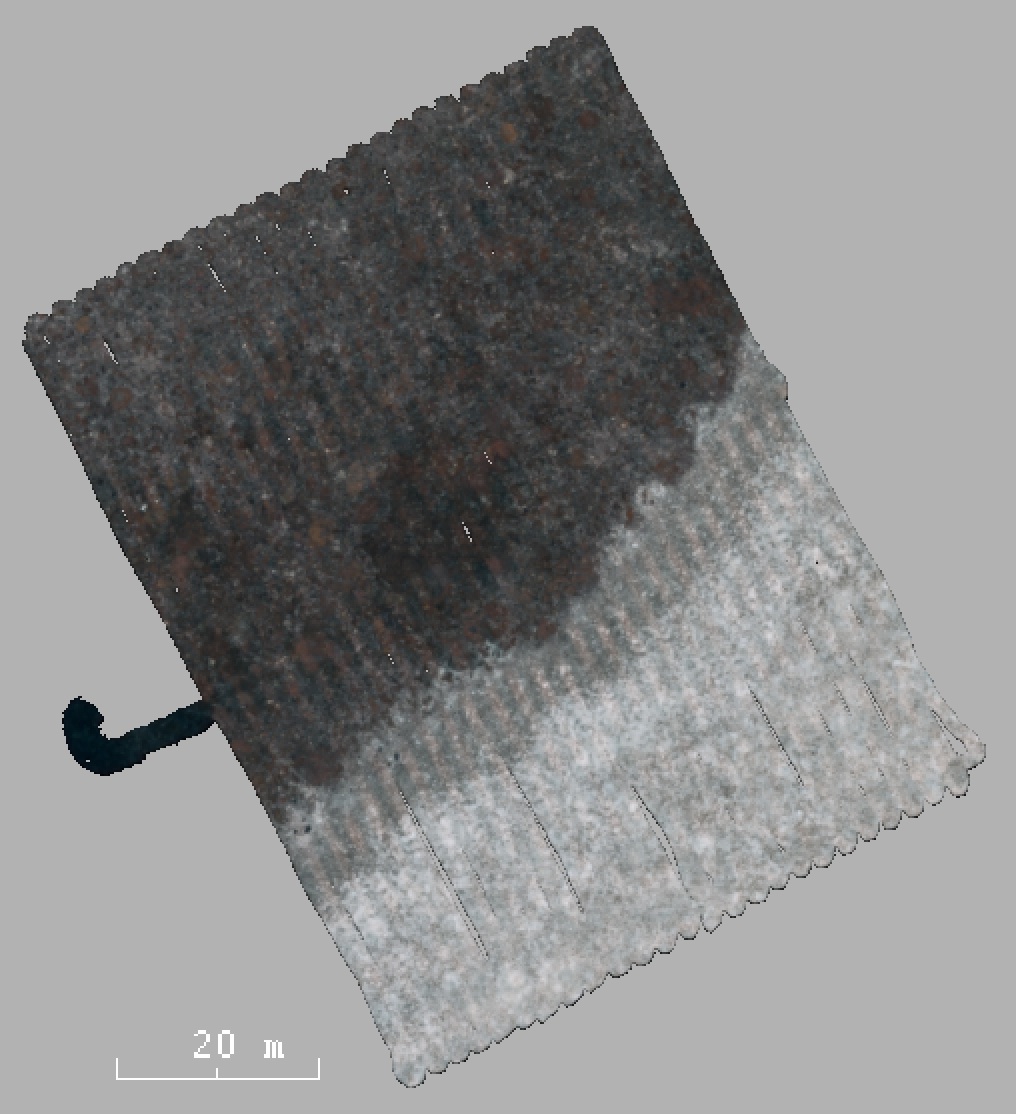
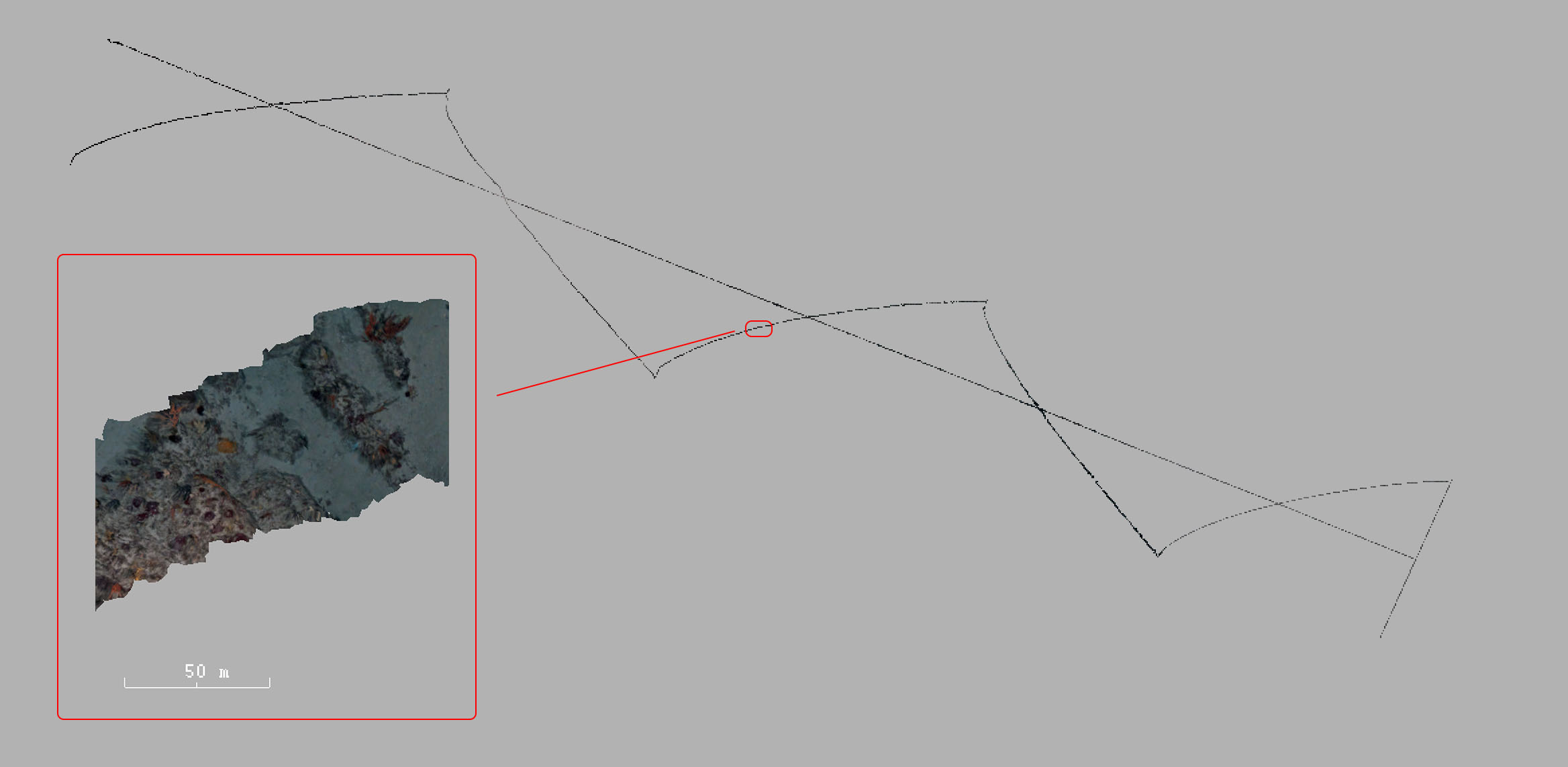
This dataset consists of 11200 stereo image pairs captured by the Sirius AUV traversing a transect of >4km. Each image has geo-tags from a SLAM solution and 50 expert annotations.
The data set is comprised of 22 dive missions conducted by AUV Sirius off the South-East coast of Tasmania in October 2008. From the data set containing over 100,000 stereo pairs of images, marine scientists selected every 100th colour image, and used the CPCe software package to label 50 random points on each.
A wide range of class labels were used, indicating biological species (including types of sponge, coral, algae and others), abiotic elements (types of sand, gravel, rock, shells etc.), and types of unknown data (ambiguous species, poor image quality, etc.).
@inproceedings{inproceedings,
author = {Steinberg, D and Friedman, Alon and Pizarro, Oscar and Williams, Stefan},
title = {A Bayesian Nonparametric Approach to Clustering Data from Underwater Robotic Surveys},
year = {2011}
}