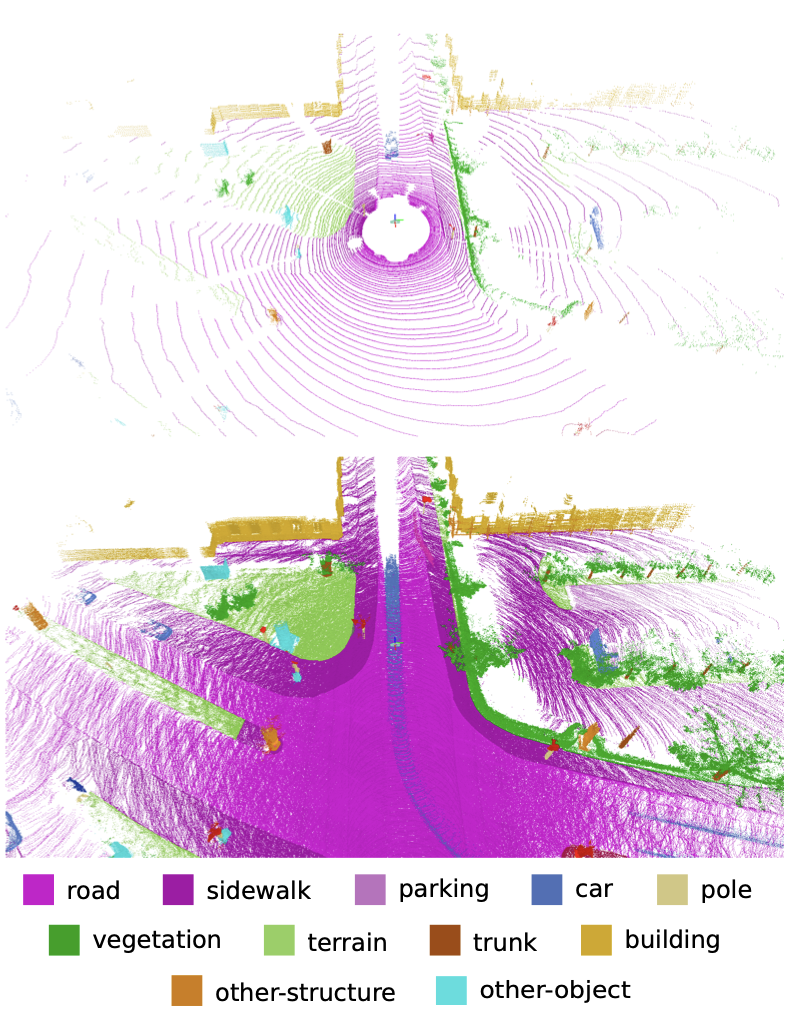
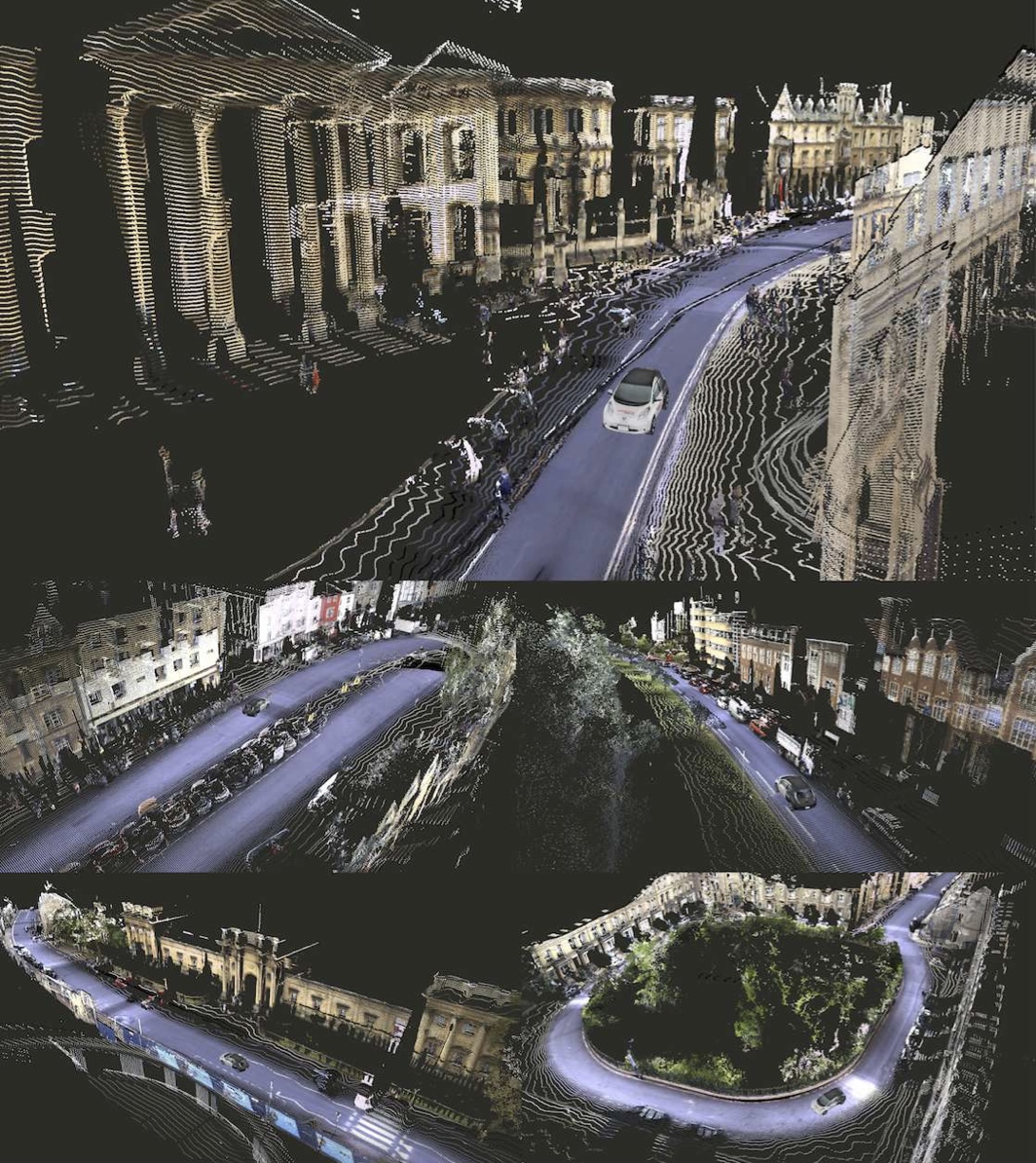
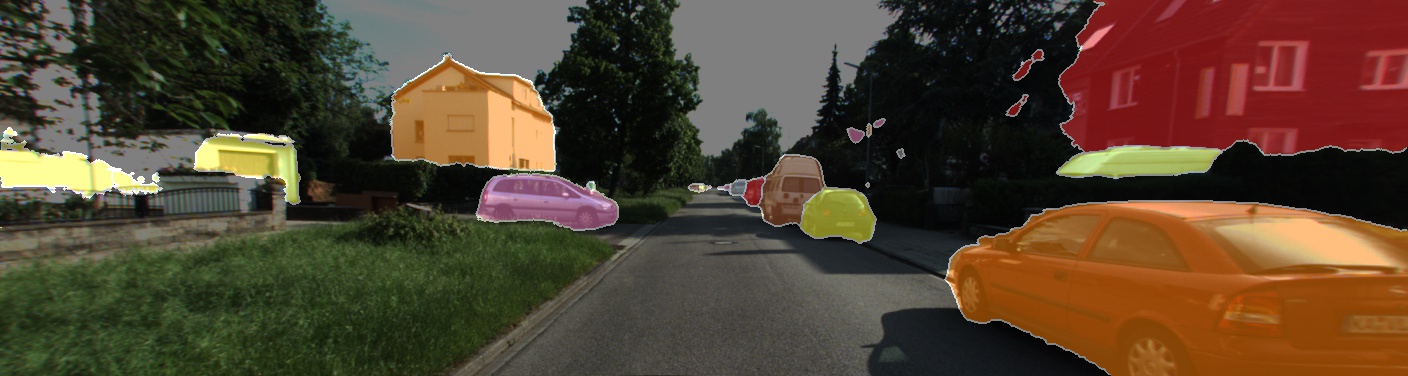
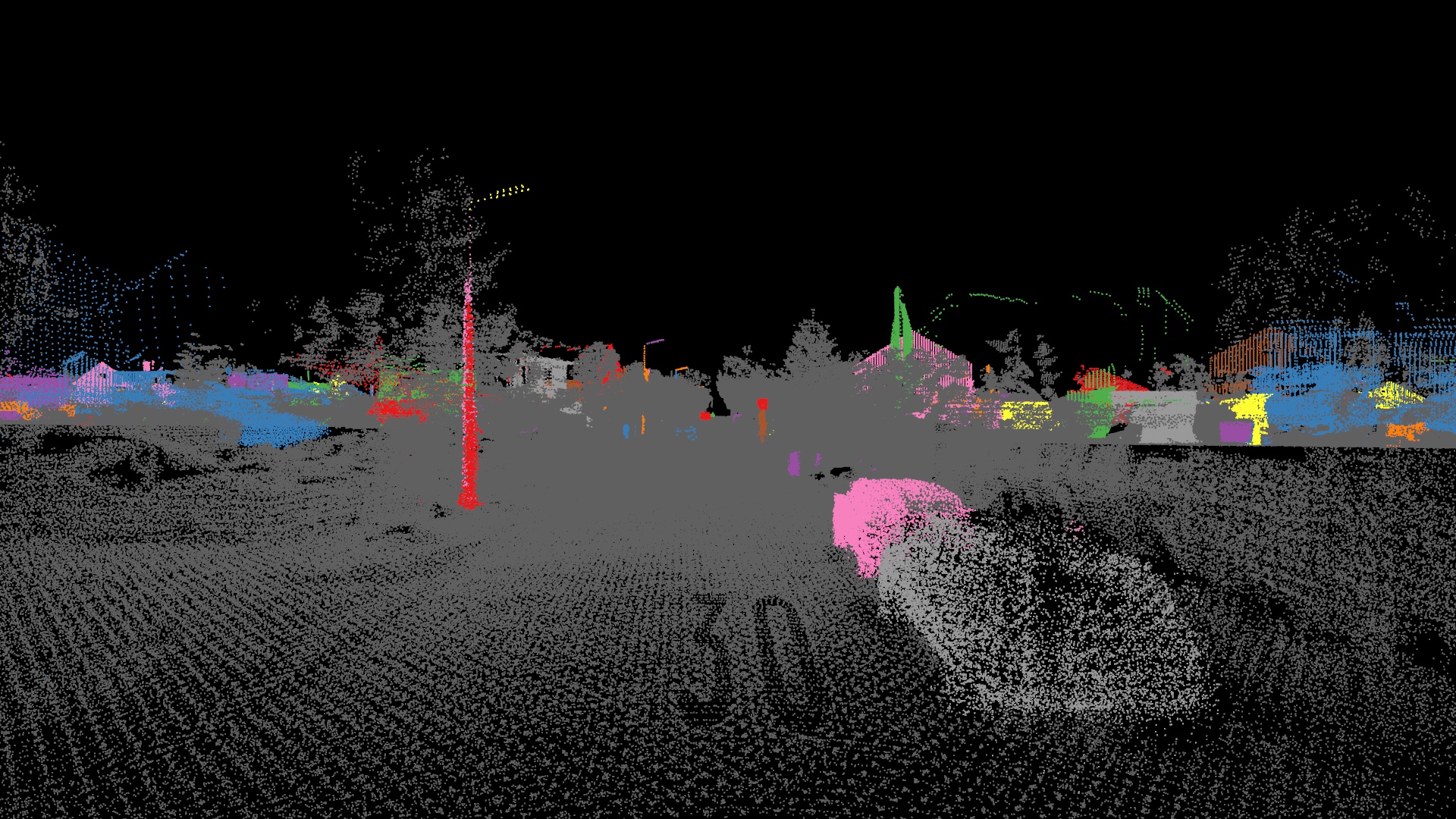
KITTI-360 is a large-scale georegistered suburban driving dataset of over 320k images and 100k laser scans, along with semantic scene element instance annotations in both 2D and 3D.
This dataset is intended to facilitate research at the intersection of vision, graphics, and robotics, particularly semantic scene understanding, novel view synthesis, semantic SLAM, and more broadly, the development of autonomous driving systems.

@article{Liao2022PAMI,
author = {Yiyi Liao and Jun Xie and Andreas Geiger},
journal = {Pattern Analysis and Machine Intelligence (PAMI)},
title = {{KITTI}-360: A Novel Dataset and Benchmarks for Urban Scene Understanding in 2D and 3D},
year = {2022}
}